How to Build a Pick and Place Robot
Create your own pick and place robot with this step-by-step guide, using servo motors and a gripper to move objects. Includes materials, interactive instructions, video tutorials, troubleshooting tips, customization ideas, and a project gallery.
Project Outcome
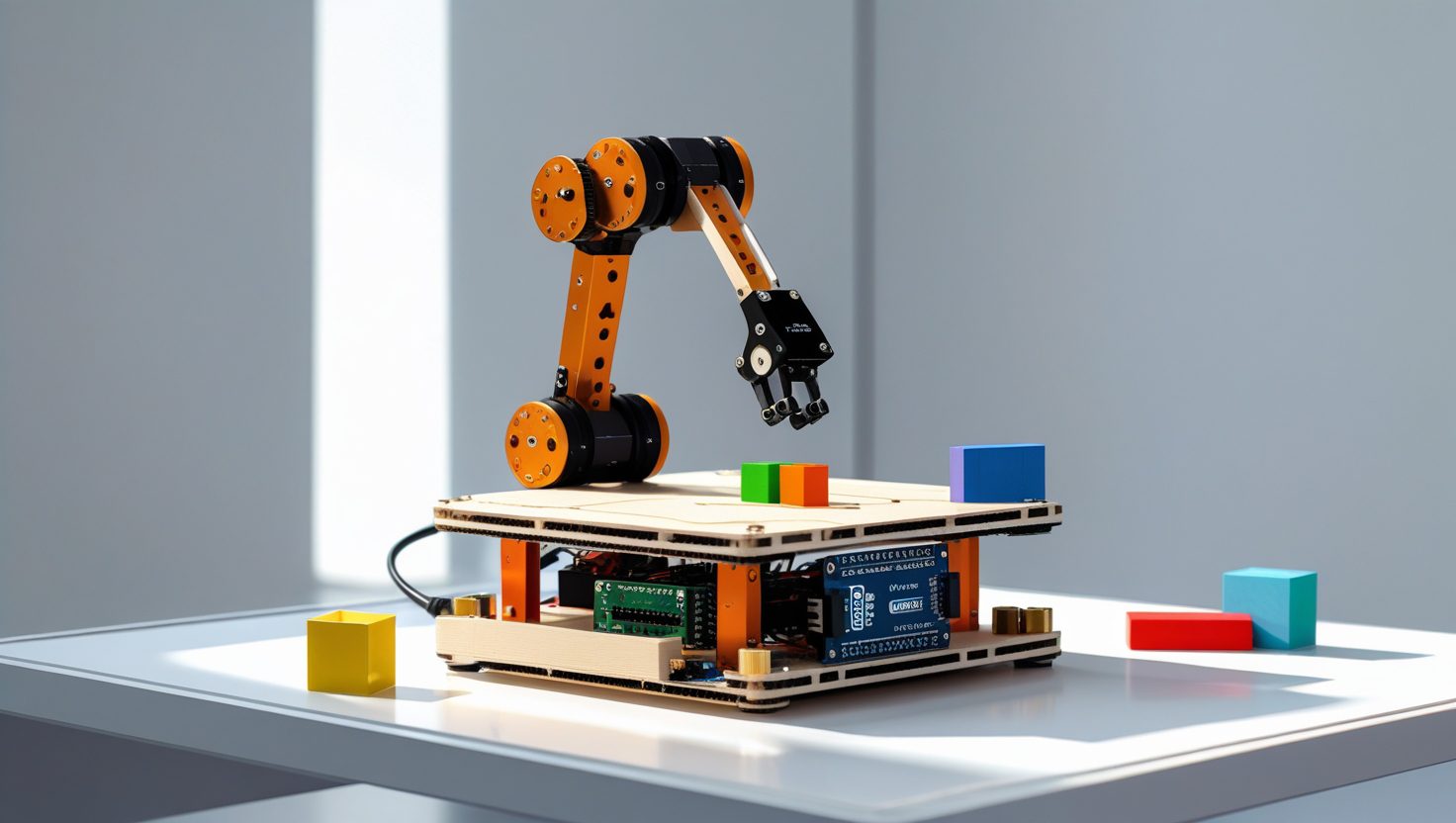
By completing this project, you’ll build a fully functional pick and place robot that uses servo motors to move objects from one location to another, triggered by a button press. This Arduino-based project introduces servo motor control, digital input handling, and robotic arm mechanics.
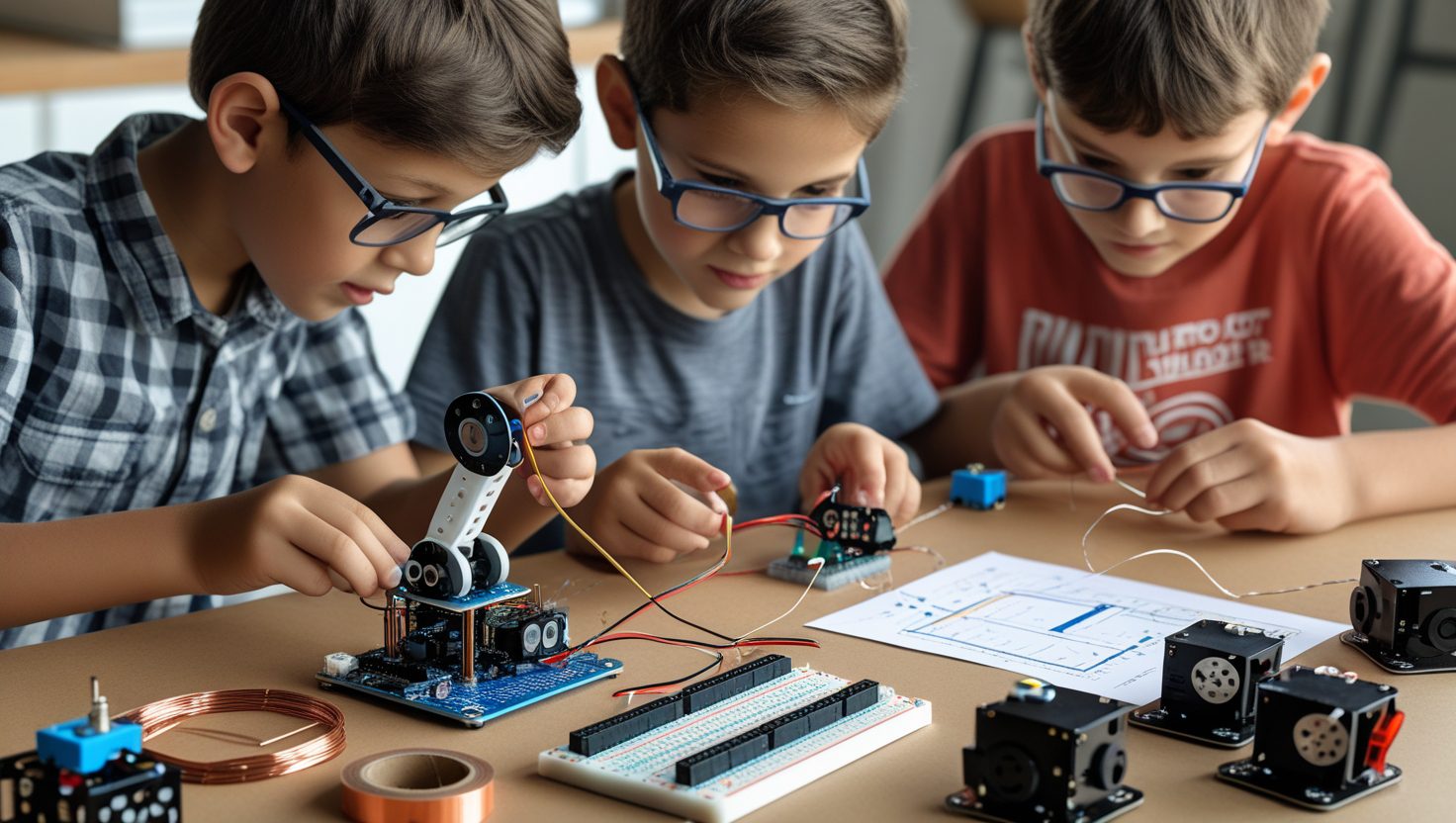
- Build Skills: Master servo programming, arm assembly, and button input.
- Customize: Add features like sensor-based picking, advanced grippers, or wireless control.
- Learn: Gain hands-on experience in robotics and automation.
Perfect for beginners and hobbyists interested in robotic systems!
What You'll Learn
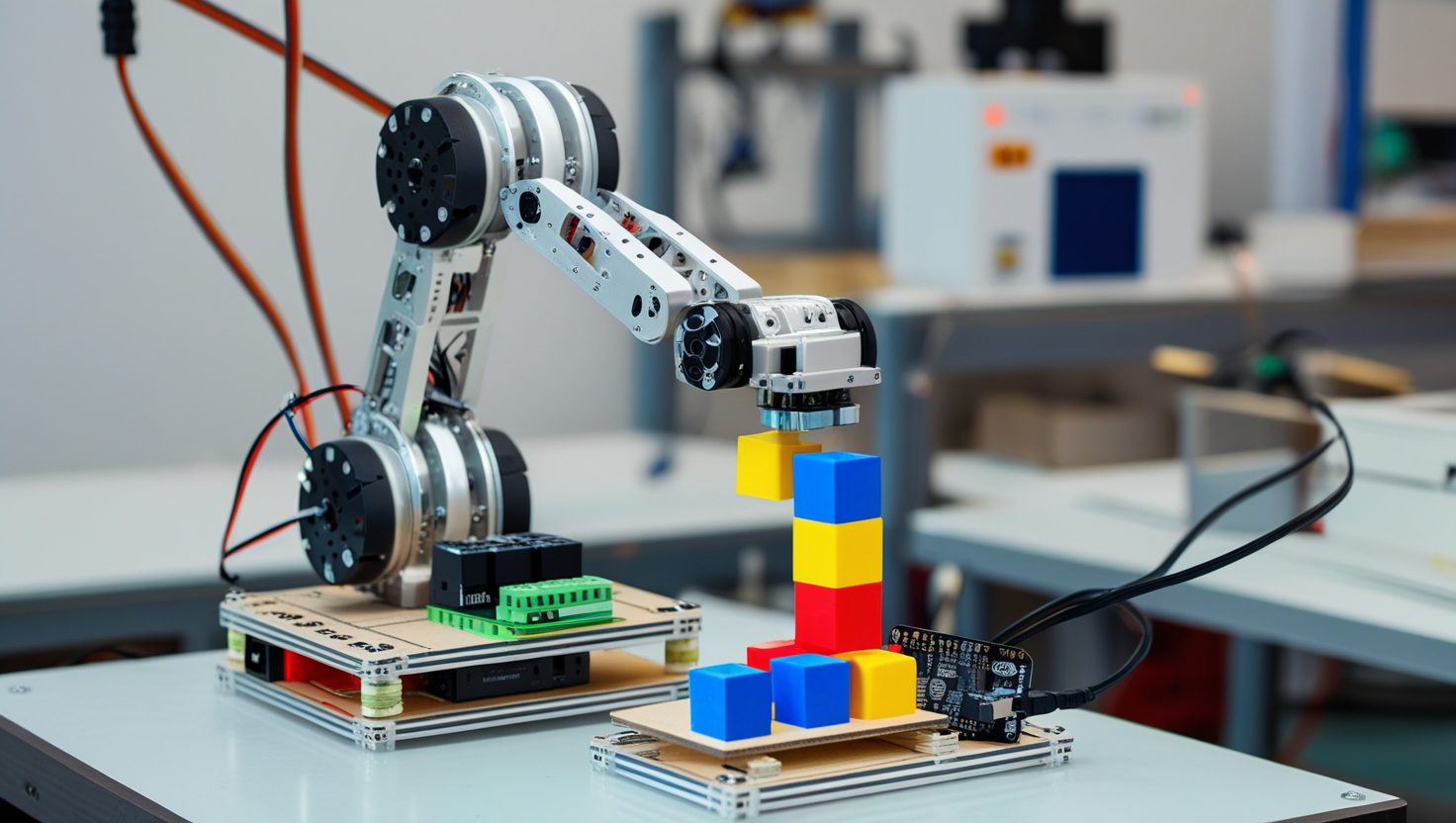
Robotic Assembly
Learn to build a robotic arm with servos and a gripper.
Button Input
Master detecting button presses for arm control.
Arduino Programming
Write code to control servos and gripper movements.
Problem-Solving
Debug servo and gripper issues for reliable operation.
Robotics Concepts
Understand pick and place automation systems.
Required Materials
Main controller
Pick trigger
Servo motors for arm
For picking objects
Connections
For prototyping
Power supply (9V or USB)
Video Tutorials
Overview of Pick and Place Robot Build
Troubleshooting Tips
Push Button Not Detecting
Check button wiring, ensure proper pull-down resistor, and verify pin assignments in code.
Servos Not Moving
Confirm servo connections, verify power supply, and check Arduino pin assignments.
Gripper Not Holding
Ensure gripper servo alignment, check object weight, and adjust gripper design.
Inaccurate Arm Movement
Calibrate servo angles in code and check for mechanical obstructions.
Customization Ideas
+Sensor-Based Picking
Use an IR or ultrasonic sensor to detect objects for automatic picking.
+Advanced Gripper
Upgrade to a suction cup or magnetic gripper for diverse objects.

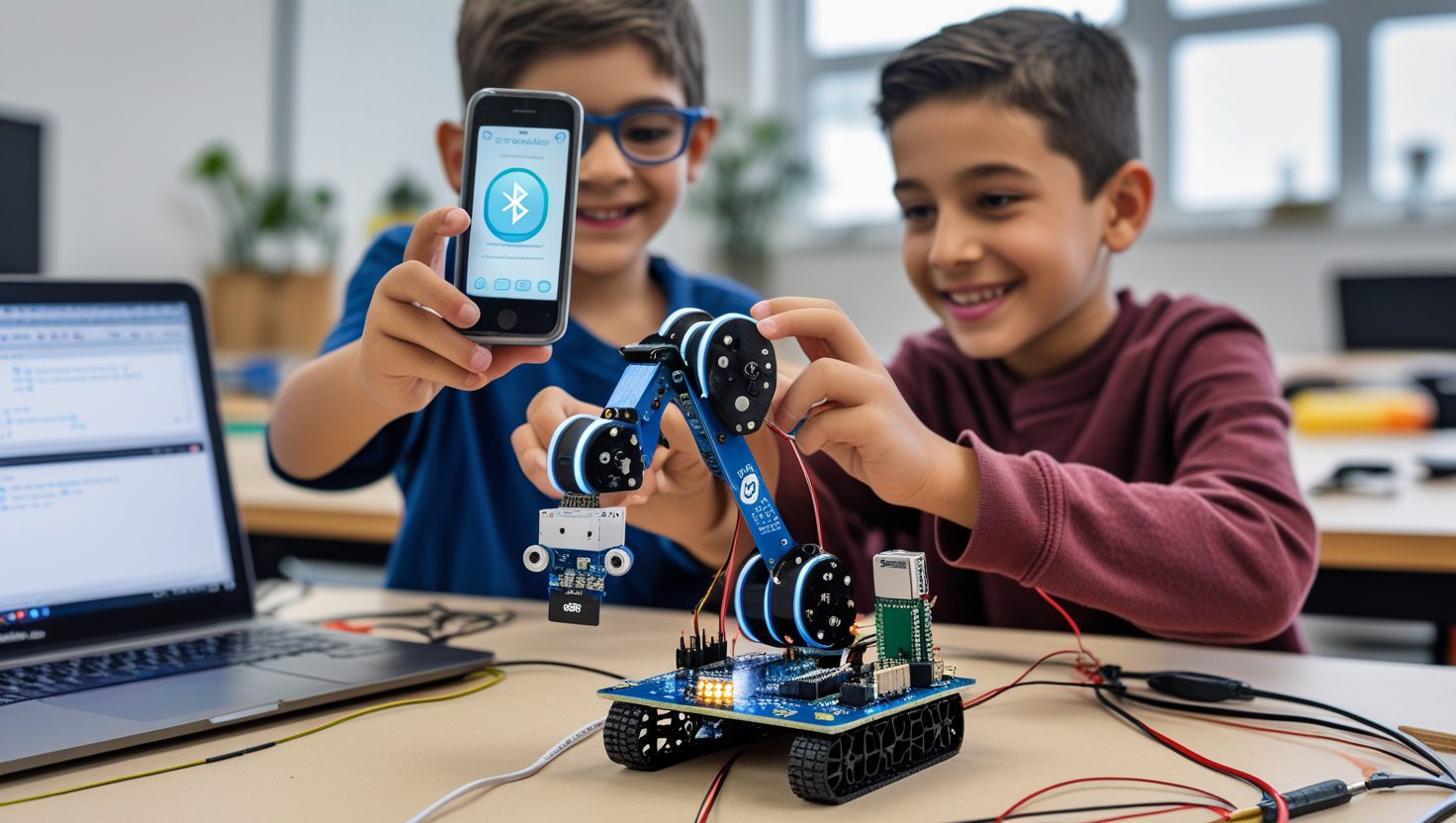
+Bluetooth Control
Add a Bluetooth module to control the arm via a smartphone app.
Project Gallery